Rev AiBi. 2020; 8 (S1):e800
http://dx.doi.org/10.15649/2346030X.800
Diseño de un sistema de medición de material particulado mediante un vehículo aéreo no tripulado.
Design of a particulate matter measurement system using an unmanned aerial vehicle.
Jeison Eduardo Eslava-Pedraza 1
Franyer Adrian Martinez-Sarmiento 2
Ángelo Joseph Soto-Vergel 3
Edwin Jose Vera-Rozo 4
Dinael Guevara-Ibarra5
Recibido: 1 de junio de 2020.
Aprobado: 11 de noviembre de 2020.
Atribución 4.0 Internacional (CC BY 4.0)
Palabras Clave: Calidad del aire, Diseño electrónico, Instrumentación, Material particulado, Vehículo aéreo no tripulado.
Keywords: Air quality, Electronic design, Instrumentation, Particulate matter, Unmanned aerial vehicle.
I. INTRODUCCIÓN
En los últimos años la calidad del aire se ha visto afectada por diferentes gases y partículas en suspensión, según la Organización Mundial de la Salud (OMS) una de cada nueve muertes presentes a nivel mundial es causadas por aspectos relacionados de manera directa a la calidad de aire [1], siendo este un tema de investigación debido al incremento de enfermedades respiratorias y cardiovasculares [2]. Además, las partículas en suspensión como el Material Particulado (en inglés Partuculate Material, PM) PM2.5 y PM10.0 afectan directamente la calidad del aire y a su vez la vida humana debido a que se considera como un contaminante de alto grado de afectación en el cuerpo. Adicionalmente, se ha visto un auge en el uso y desarrollo de vehículos aéreos no tripulados (en inglés Unmanned Aerial Vehicle, UAV) empleados en actividades de observación a distancia para la preservación de la integridad humana o para labores técnicas como inspecciones de oleoductos, tuberías y zonas de mantenimiento [1], además de logística humanitaria para la brusquedad y rescate en catástrofes ambientales [2] y logística de última milla para la entrega de envíos [3]; así también en actividades de vigilancia [4],[5], reconocimiento geográfico [6], agricultura [7], control [8], evaluación del clima [9] y de los contaminantes por parte de los gases de efecto invernadero [10].
Teniendo en cuenta lo anterior, en Colomba el 76% de los municipios que cuentan con sistema de calidad del aire incumplen los estándares establecidos por la OMS a nivel mundial, siendo estos perjudiciales para la salud, sin embargo, el 74% cumple con los estándares nacionales. Estos sistemas empleados por los entes regulatorios y organismos de control se sustentan en herramientas y sistemas de mediciones estáticos que abarcan un área delimitada dejando zonas sin evaluar. Para dar solución a esta problemática [11] emplea sistemas fijos distribuidos en áreas específicas, además en [12] realizan modelos matemáticos para la estimación de la concentración de contaminantes mediante modelos de dispersión de PM10.0; así mismo, otras investigaciones se enfocan en el desarrollo de sistemas de censado mediante redes neuronales [13]. Todo con la finalidad de que la información recolectada sea suministrada a los organismos de control ambiental para su respectivo análisis. Por otro lado, las investigaciones están siendo orientadas al desarrollo y aplicaciones de los UAV, por ejemplo [10] sustenta sus avances en estas áreas enfocados al uso de productos y herramientas de libre acceso para el diseño e instrumentación de este tipo de vehículos, dando relevancia a la construcción de los mismos por lo cual es necesario considerar diferentes aspectos técnicos de hardware y software como aeronavegabilidad, estabilidad, autonomía, peso, dispositivos de control, técnicas para vuelos autónomos y lenguajes de programación que permitan el correcto funcionamiento.
Por ende, conociendo las aplicaciones existentes de los UAV en el área ambiental respecto a tareas de control y vigilancia, este proyecto se centra en el diseño y construcción preliminar de un UAV tipo ala Zagi y de la placa de circuito impresa (del inglés Printed Circuit Board, PCB) del sistema de medición que proporcionan un modelo base de prototipo para la toma de mediciones de las variables PM2.5 y PM10.0 en el aire en un espacio determinado. Este tipo de vehículos sirven como dispositivos de desplazamiento y soporte de sistemas de medición con el objetivo de monitorear grandes espacios y observar, a través de datos, el comportamiento de las variables en intervalos de tiempo [14], además de mantener una estabilidad y manejabilidad óptima facilitando procesos de medición donde sea requerido.
Este articulo está enmarcado en una metodología de dos etapas principales, diseño y elaboración del UAV, el cual se enmarcan ítems de requerimientos generales, estructura del UAV y selección de características técnicas; la segunda etapa se centra en el desarrollo de la instrumentación del sistema de mediciones y de control. Teniendo en cuenta lo anterior este articulo expone las teorías, conceptos, fundamentos metodológicos, resultados, y conclusiones, que dan un enfoque más detallado del trabajo realizado.
II. MARCO TEÓRICO
En este apartado se presentan conceptos que permiten describir los procesos y requerimientos para el diseño, construcción e instrumentación de un UAV. A continuación, se definen la autonomía, carga paga, perfil alar, velocidad de crucero y peso.
Se define como el tiempo máximo que puede durar el vehículo en funcionamiento hasta agotar totalmente su energía esta depende de las características de las baterías implementadas [6], [15].
Se describe como el peso que genera algún beneficio al momento de realizar el transporte de una carga neta, en el caso de las aerolíneas comerciales es el peso de los pasajeros, equipaje y suministros; sin embargo, para el UAV, este aspecto hace referencia a la estructura, sistema de mediciones y a la cantidad de peso que puede llevar sin tener en cuenta aspectos como el fuselaje, motores, entre otros dispositivos que puedan implementarse [10].
Según el Comité Asesor Nacional para la Aeronáutica (National Advisory Committee for Aeronautics, NACA) el perfil alar es el área transversal de cualquier elemento alar. Existen dos tipos: simétricos y asimétricos diferenciados por un borde de ataque con angulo de sustentación de cero y diferente de cero respectivamente; además son identificados mediante una nomenclatura para sus diferentes aplicaciones. La Figura 1 muestra las características geométricas del perfil alar las cuales pueden variar según la clasificación, tipología y forma [11].

Figura 1: Geometría del perfil alar.
Fuente: Elaboración propia. [11]
Definida como la velocidad constante en una trayectoria uniforme que puede presentar una aeronave para alcanzar unas condiciones de vuelo en donde no presenten perturbaciones por factores externos como la presión y la temperatura. La Figura 2 representa las fuerzas que actúan en un vuelo como, peso, sustentación, tracción y resistencia [8].
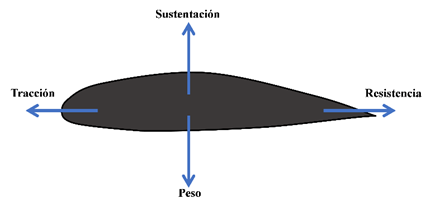
Figura 2: Fuerzas que actúan en la velocidad de vuelo.
Fuente: Elaboración propia. [16]
III. METODOLOGÍA O PROCEDIMIENTOS
La Figura 3 detalla la metodología implementada para el desarrollo de este proyecto, la cual se fundamenta en dos fases, selección e instrumentación del UAV y diseño del sistema de mediciones; estas fases se fundamentan en las exigencias para la caracterización de la calidad del aire.

Figura 3: Metodología para el diseño de un sistema de medición de material particulado mediante un vehículo aéreo no tripulado.
Fuente: Elaboración propia.
Esta fase comprende las etapas de identificación de requerimientos, selección del UAV, diseño estructural y construcción. A continuación, se detallan los aspectos relevantes.
• Identificación de requerimientos
Selecciona los requerimientos de autonomía, medida en la cantidad de minutos necesarios para un vuelo; carga paga en decimas de kilogramo teniendo en cuenta su estructura y motores; velocidad de crucero en kilómetros por hora considerando la aceleración de los motores y peso en kilogramos del UAV incluyendo el peso vacío, y baterías.
• Selección del UAV
Determina el tipo de vehículo tomando como base la clasificación de los UAV’s de acuerdo a la forma de despegue, el tipo de ala y aeronaves existentes; dando relevancia aquellas características del vehículo que no influyan en el proceso de adquisición de datos.
• Diseño estructural
Define los parámetros del boceto del vehículo para su armazón estableciendo los perfiles alares, las dimensiones de las alas, alerones y Winglets cumpliendo con el modelo seleccionado; por último, se especifica la forma y ubicación del encostillado.
• Construcción y adecuación electrónica
Realiza la fabricación teniendo en consideración todos los aspectos mencionados en el diseño, así mismo, la selección de los materiales y la elaboración de cada una de las piezas que lo componen, circuitos electrónicos y de potencia.
Describe las etapas criterios de operación, selección de tecnologías y diseño del circuito de instrumentación, para la puesta en marcha del sistema de mediciones. A continuación, se enuncias aspectos relevantes para cada ítem que lo compone.
• Criterios de operación
Establece las dimensiones, peso, selección de las variables, voltajes de operación, consumos máximos de corriente/voltaje y rangos de medición.
• Selección de tecnologías
Elabora una matriz de selección con base en la importancia de cada uno se los dispositivos electrónicos implementados para el correcto funcionamiento del sistema de mediciones. Además de especificar las características técnicas y el funcionamiento de cada componente. La ponderación de la matriz estará representada en los factores como consumo energético, exactitud, precisión y costo.
• Diseño del circuito electrónico
Desarrolla el modelo circuital partiendo de los elementos y dispositivos seleccionados, además de tener en cuenta dimensiones de la PCB.
IV. RESULTADOS ANÁLISIS E INTERPRETACIÓN
Esta sección se expone los resultados más relevantes en las etapas de selección e instrumentación del UAV y diseño del sistema de mediciones.
A continuación, se relacionan características de interés, estableciendo aspectos como identificación de requerimientos, selección UAV, diseño estructural y construcción e instrumentación.
La Tabla 1 muestra los requerimientos mínimos de operación para la toma de mediciones. No obstante, existen otros factores que no se incluyen que pueden ser de importancia en algunas aplicaciones; como estabilidad en el aire y reducción del impacto en la invasibilidad del método de manera que las mediciones no sean afectadas por turbulencias ni absorción de PM por parte de las hélices.
Tabla 1: Requisitos de diseño.
Caracteristicas |
Valor |
unidad |
Autonomía Mínima |
15 |
min |
Carga paga |
0.35 |
Kg |
Velocidad crucero |
20 |
Km/h |
Peso del UAV |
1 |
kg |
Fuente: Creación propia.
A continuación, se describen los requisitos de diseño incluidos en la Tabla 1.
El desarrollo de este sistema, pretende que la autonomía necesaria para la realización de pruebas de funcionamiento esté en un rango de 15 ±2 minutos. Sin embargo, se debe tener en cuenta que es un tiempo estimado, debido a que se pueden presentar condiciones climáticas no favorables como corrientes de viento no deseadas, alta humedad relativa y lluvia durante el vuelo. Otros aspectos a considerar, están relacionados de manera directa con las corrientes térmicas de viento presentes al momento del vuelo, ya que estas pueden ser favorable o no para el vehículo.
La Tabla 2 detalla el peso de los componentes del sistema de mediciones y posicionamiento, esperando no superar un estimado de 0.35 Kg. En el total de la carga paga.
Tabla 2: Peso de los componentes electrónicos de la carga paga.
Peso (Kg) |
|
Módulo GPS |
|
Sensor de humedad y temperatura |
0.003 |
Sensor de Material Particulado |
0.181 |
Placa de control |
0.05 |
PCB |
0.02 |
Batería Receptor |
0.036 |
Regulador de carga |
0.0045 |
Batería de Lipo |
0.155 |
Fuente: Elaboración propia. [17]
Se da al momento de generar la mínima aceleración manteniéndose a una altura constante, esta velocidad oscila entre 35 a 45 Km/h, garantizando una operación estable durante el recorrido y una toma de datos precisa.
Inicialmente se considera el peso específico que presentara el UAV mediante (1) conformado por la carga paga, las baterías y el peso vacío formado por la estructura del UAV, los motores, los equipos fijos, sistemas de comunicación, alerones y mando de control denotados por (2) [13].
WT = WCP + WV + WB (1)
Donde:
WT es el peso total del UAV
WCP es el peso de la carga paga
WV es el peso vacío
WB es el peso de las baterías
WV = WE + Wm + WAV + Wal (2)
Donde:
WE es el peso estructural
Wm es el peso de los motores
WAV es el peso del sistema de comunicacion y cableado.
WAL es el peso de los alerones
La Figura 4 muestra los UAV categorizados según su tipo de despegue, tipo de ala y aeronave.
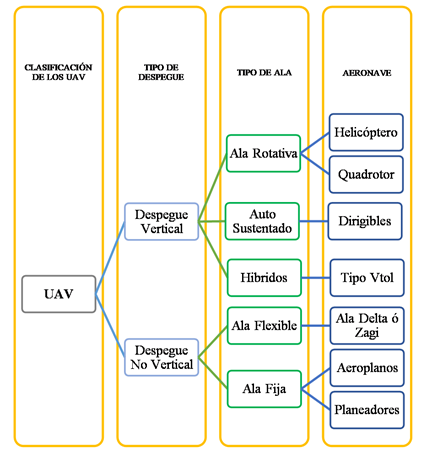
Figura 4: Clasificación de los UAV.
Fuente: Elaboración propia. [18]
Para la selección del tipo de UAV se consideran aspectos como velocidad de desplazamiento, autonomía de vuelo, resistencia al viento, capacidad de carga y estabilidad. La Tabla 3 evalúa los tipos de UAV que puedan cumplir estos criterios.
Tabla 3: Comparativa de los Tipos de UAV.
VD |
AV |
RV |
CC |
E |
|
Helicóptero |
3 |
2 |
2 |
3 |
1 |
Quadrotor |
2 |
2 |
2 |
2 |
2 |
Dirigibles |
1 |
4 |
1 |
1 |
4 |
Tipo Vtol |
3 |
1 |
3 |
4 |
4 |
Ala Delta ó Zagi |
4 |
3 |
4 |
4 |
3 |
Fuente: Elaboración propia. [19]–[21]
Nota: VD (Velocidad de Desplazamiento), AV (Autonomía de Vuelo), RV (Resistencia al Viento), CC (Capacidad de Carga), E (Estabilidad).
Es importante resaltar que las ponderaciones aplicadas en la Tabla 3 presenta la clasificación de las características como, Malo (1), edio (2), Bueno (3) y Muy Bueno (4).
Con las características mencionadas en la comparativa de los tipos de UAV se crea la matriz de atributos fundamentados en el método de selección binaria [22]. La Tabla 4 detalla los valores ponderados para cada atributo.
Tabla 4: Matriz de atributos para la calsificacion de los UAV.
A1 |
A2 |
A3 |
A4 |
A5 |
Valor |
Peso |
|
A1 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
A2 |
1 |
0 |
1 |
1 |
1 |
4 |
0.444 |
A3 |
1 |
0 |
0 |
0 |
0 |
1 |
0.111 |
A4 |
1 |
0 |
1 |
0 |
0 |
2 |
0.222 |
A5 |
1 |
0 |
0 |
1 |
0 |
2 |
0.222 |
Fuente: Elaboración propia.
Nota: A1 (Velocidad de Desplazamiento), A2 (Autonomía de Vuelo), A3 (Resistencia al Viento), A4 (Capacidad de Carga), A5 (Estabilidad).
En consideración a la Tabla 4 se crea (3), que permite elegir el tipo de UAV que presenta resultados adecuados acorde a las consideraciones establecidas, asignando variables a cada tipo de vehiculo de la siguiente manera: M1 - Helicóptero, M2 - Quadrotor, M3 - Dirigibles, M4 - Tipo Vtol, M5 - Ala Delta o Zagi.
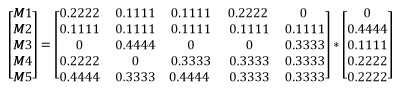
Como consecuencia de la aplicación de este método se selecciona el UAV tipo ala Delta o Zagi, debido a que presento un resultado con valor 0.3209 debido a que ofrece una eficiencia aerodinámica y una estructura adecuada para evitar interferencias en la medición de material particulado. Además, presenta un menor consumo de energía debido a que su geometría le permite planear a una velocidad tal que los motores no interfieren en las mediciones. No obstante, los demás vehículos comparados como el dirigible, tipo vtol, helicóptero y Quadrotor presentan ponderaciones de 0.2716, 0.1851, 0.1111 y 0.1111 respectivamente.
La Figura 5 detalla la estructura base, como diseño preliminar, del UAV en donde se presentan las dimensiones generales del vehículo y especifica las piezas que lo componen como Winglets, encostillado, alerones y alas; además, la posición en donde incorpora los motores y hélices.
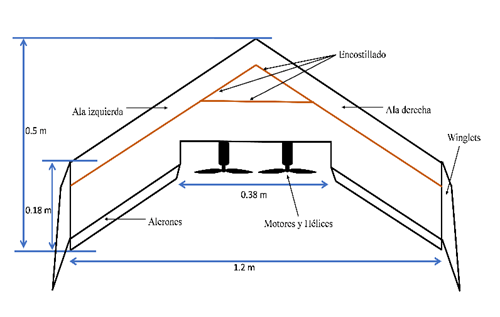
Figura 5: Diseño preliminar del UAV.
Fuente: Elaboración propia.
Teniendo en cuenta el diseño preliminar se realizan los bocetos de cada pieza que compone el UAV. A continuación, se describe cada uno de estos.
Son las superficies móviles posicionadas en la parte posterior del extremo de cada ala, los cuales genera un movimiento de alabeo para direccionar el UAV sobre su eje longitudinal; además, cuentan con un sistema de control utilizando servomotores para ello [23],[24].
La Figura 6 muestra las dimensiones y formas a emplear en los alerones presentando una curvatura en su sección final para aumentar la eficiencia en desplazamiento.
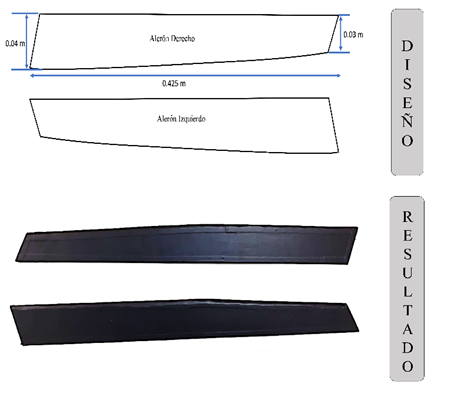
Figura 6: Diseño y dimensiones alerones.
Fuente: Elaboración propia.
Se consideran un elemento principal de cualquier UAV que presenta dentro de sus características la versatilidad de planear, por lo que son las que direccionan las fuerzas que permiten el vuelo [25], [26]. La Figura 7 especifica el diseño y el tipo de alas Zagi para el UAV.

Figura 7: Diseño y dimensiones alas.
Fuente: Elaboración propia.
Para el diseño estructural de las alas se tienen en cuenta los perfiles alares “N.A.C.A 2412, 1933” y “Clark Y”, estos tienen, representado en su diseño, la forma geométrica que tomarán las alas y por consiguiente la forma del UAV tipo Zagi. La Figura 8 muestra el boceto de los perfiles alares utilizados y sus respectivas dimensiones en la línea de curvatura media y el espesor máximo que presenta el vehículo.
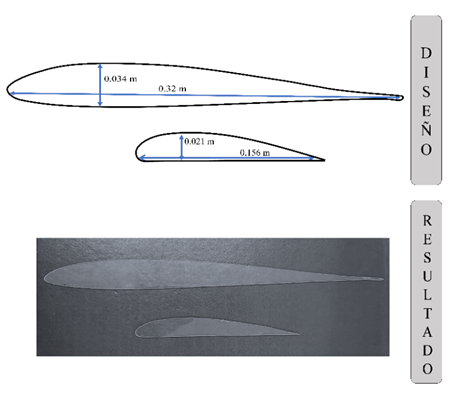
Figura 8: Perfiles alares del UAV.
Fuente: Fuente: Elaboración propia. [11]
Son estructuras posicionadas en los extremos del ala con la finalidad de obtener mayor estabilidad, aumentar el alcance y ganar eficiencia aerodinámica [14], [27]. La Figura 9 muestra el diseño de un modelo de Winglets Bunny ears realizado por los autores basado en [18], [28], [29].
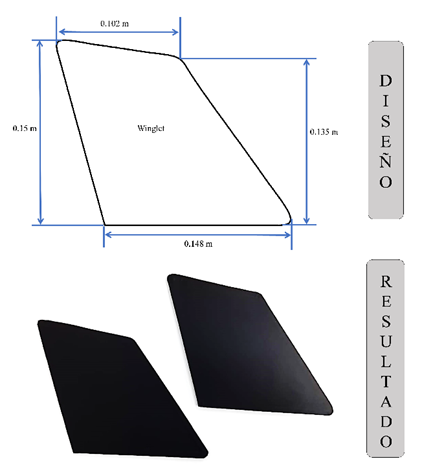
Figura 9: Diseño y resultado de los Winglets del UAV.
Fuente: Elaboración propia. [14], [30]
Representa la estructura interna del UAV en forma de “A” dándole soporte a la estructura general del vehículo, debido a que esta pieza se considera como la columna vertebral de la aeronave. La Figura 10 detalla la ubicación del encostillado en la estructura del UAV.

Figura 10: Resultados del encostillado del UAV.
Fuente: Elaboración propia.
Tabla 4: Validación del tipo de hélice.
Dimisiones de la hélice (m) |
Velocidad en PPM |
|||
25% |
50% |
80% |
100% |
|
0.15x0.089 |
0.1652 kg |
0.02184 kg |
0.2747 kg |
0.2968 kg |
0.18x0.1 |
0.1614 kg |
0.2308 kg |
0.2454 kg |
0.2767 kg |
0.2x0.15 |
0.0785 kg |
0.1347 kg |
0.1424 kg |
0.1609 kg |
Fuente: Elaboración propia.
Nota: PPM (Modulación por posición de pulso)
Evaluando los resultados obtenidos, la hélice de dimensiones 0.15x0.089 presenta una mayor capacidad de empuje, por lo que es seleccionada para propulsar el UAV.
La Figura 11, detalla las conexiones internas que presenta el UAV especificando componentes y dispositivos electrónicos. Los motores Brushless presentan un controlador de velocidad y alimentación independiente con la finalidad de poder suplir con la cantidad de energía requerida para completar el vuelo, el módulo receptor de radiofrecuencia recibe los datos del radio control y envía las acciones a cada dispositivo siendo suplido con una a alimentación de 5 V regulada por su batería independiente.
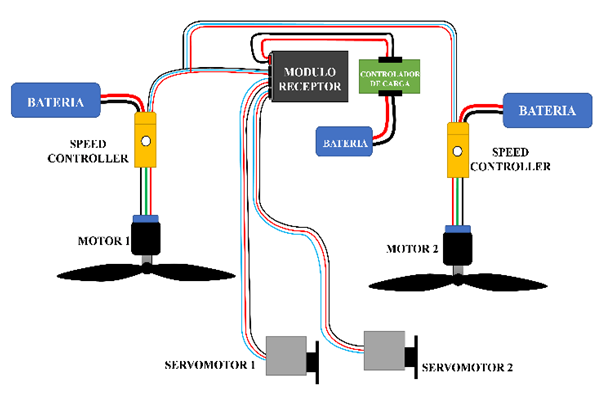
Figura 11: Instrumentación del UAV.
Fuente: Elaboración propia.
Por otra parte, para el control de dirección de los alerones se seleccionan los servomotores Corona DS939HV con capacidad de 2.8 Kg, velocidad de respuesta de 0.12 sec/60° y peso de 0.125 Kg; con la finalidad de poder soportar las corrientes de aire y dar dirección al UAV. En la Figura 12 se observan el servomotor, la Figura 13 el motor brushless 2200kv, la hélice de 0.15x0.089 y Speed controller.

Figura 12: Servomotor Corona DS939HV.
Fuente: Elaboración propia.

Figura 13: Motor 2200kv, hélice 15x8.9 y speed controller a 30 A.
Fuente: Elaboración propia.
La Tabla 5 detalla las dimensiones del UAV, la capacidad de carga paga, peso específico y autonomía. El prototipo se construye con un 90% de poliestireno y 10% de madera balsa, siendo cubierta por una capa fina de papel vinilo a fin de protegerlo contra la humedad. Así mismo, los motores se posicionan en la parte trasera de manera central.
Tabla 5: Características físicas y eléctricas del UAV.
Características UAV |
|
Tipo de UAV |
Ala Zagi |
Envergadura |
1.2m |
Materiales |
Poliestireno, Balso, Aluminio, Papel vinilo |
Peso del UAV |
0.8812kg |
Motores |
Brushless Turnigy 2200KV |
Speed Control |
30A |
Autonomía |
15 ±2 minutos |
Carga paga |
400 g |
Fuente: Elaboración propia.
La Figura 14 muestra el resultado final del UAV en donde incorpora la instrumentación, y su estructura completa para adaptar el sistema de mediciones. La construcción de este vehículo se apoya en el diseño general preliminar de la Figura 5.
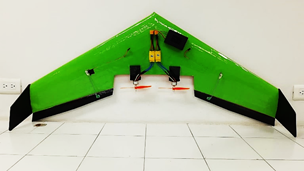
Fuente: Elaboración propia.
Figura 14: UAV ala Zagi con el circuito electrónico.
Esta etapa expone los criterios de operación y selección de cada uno de los componentes del sistema de mediciones.
Las dimesiones a considerar para el diseño de la PCB son 0.110 m de largo por 0.085 m de ancho donde el área máxima es ocupada por el sensor y la placa de control. Para la selección de las variables se evalúan aspectos como: el PM en sus dos medidas principales 10.0 µm y 2.5 µm, siendo necesario conocer los agentes expuestos en los microclimas en donde la temperatura y la humedad son variables que influyen en la concentración de este contaminante [31], [32]. Adicionalmente, se considera la geolocalización a fin de caracterizar espacialmente un área determinada en función de las variables medidas.
La Tabla 6 relaciona las características técnicas para sensores de humedad y temperatura, de donde se selecciona el DHT22 por sus características técnicas y monetarias adecuadas respecto a otros, descartando los dispositivos industriales por su costo y robustez.
Tabla 6: Especificaciones técnicas de sensores de humedad y temperatura.
Sensor |
DHT11 |
DHT22 |
SHT21 |
SHT11 |
Voltaje |
3 a 5.5 V |
3.3 a 6 V |
3.6 V |
2.4 a 5.5V |
ResH |
1% RH |
0.1% RH |
0.7%RH |
0.4%RH |
ResT |
1°C |
0.1°C |
0.4°C |
0.04°C |
RMH |
20-90 %RH |
0-100%RH |
0-100%RH |
0-100%RH |
RMT |
0 a 50°C |
-40 a 80 °C |
-40 a 125 °C |
-40 a 123.8 °C |
PT |
|
|
|
|
PH |
|
|
|
|
Precio |
$5.900 |
$16.900 |
$18.500 |
$37.000 |
Fuente: Elaboración propia. [33]–[36].
Nota: ResH (Resolución de Humedad), ResT (Resolución de Temperatura), RMH (Rango de Medición de Humedad), RMT (Rango de Medición de Temperatura), PT (Precisión de temperatura), PH (Precisión de Humedad).
Para el Modulo GPS se selecciona el GY-NEO-6M, por su bajo costo y accesibildad en el mercado local.
La Tabla 7 detalla las especificaciones técnicas más relevantes para la selección del sensor de material particulado teniendo en cuenta el metodo de decisión binaria.
Tabla 7: Especificaciones técnicas del sensor de material particulado.
C E (mA) |
VO (V) |
D ( |
P ( |
C ($) |
|
PPD42NS |
90 |
5 |
59x45x22 |
24 |
11.5 |
DSM 501A |
90 |
5 |
59x45x20 |
24 |
5.2 |
HK-A5 Laser |
120 |
5 |
46x35x20 |
40.8 |
69 |
HM3301 |
75 |
3.3 – 5 |
80x40x22 |
18.1 |
29.9 |
PMS5003 |
100 |
3.3 – 5 |
50x38x21 |
42 |
11.25 |
Fuente: Elaboración propia. [37]–[41].
Nota: CE (Consumo energético), D (Dimensiones), P (Peso), C (Costo $US), VO (Voltaje de operación).
Para la selección del sensor de PM, la Tabla 8 pondera consumo energético, dimensiones, peso, costo y voltaje de operación, sin tener en cuenta precisión y rango de medición debido a que todos disponen de 1 µg/m3 y de 0 a 1000 µg/m3 respectivamente.
Tabla 8: Matriz de atributos para el sensor de PM.
A1 |
A2 |
A3 |
A4 |
A5 |
Valor |
Peso |
|
A1 |
0 |
0 |
0 |
1 |
0 |
1 |
0.1 |
A2 |
1 |
0 |
1 |
1 |
1 |
4 |
0.4 |
A3 |
1 |
0 |
0 |
0 |
1 |
2 |
0.2 |
A4 |
0 |
0 |
1 |
0 |
1 |
2 |
0.2 |
A5 |
1 |
0 |
0 |
0 |
0 |
1 |
0.1 |
Fuente: Elaboración propia.
Nota: A1 (Consumo Energético), A2 (Dimensiones), A3 (Peso), A4 (Costo), A5 (Voltaje de Operación).
Considerando las ponderaciones de la Tabla 8, se crea (4) que permite elegir como resultado el dispositivo electrónico, asignando variables a cada tipo de sensor de la siguiente manera: I1 - Shinyei PPD42NS, I2 - Samyoung DSM 501A, I3 - Heck Smart HK-A5 Laser, I4 - HM3301, I5 - PMS5003.
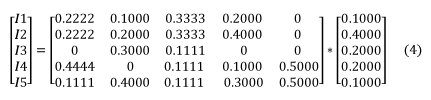
La aplicación del método de decisión binaria da como resultado (5) seleccionando el sensor de material particulado de referencia PMS5003 con una ponderación de 0.253.

La selección de la placa de control se sustenta bajo la misma metodología de selección. La Tabla 9 presenta los pesos de acuerdo a las características elegidas.
Tabla 9:Ponderación de pesos matriz de selección de la placa
A1 |
A2 |
A3 |
A4 |
A5 |
Valor |
Peso |
|
A1 |
0 |
1 |
0 |
0 |
0 |
1 |
0.1 |
A2 |
1 |
0 |
0 |
0 |
0 |
1 |
0.1 |
A3 |
0 |
1 |
0 |
1 |
1 |
3 |
0.3 |
A4 |
1 |
1 |
0 |
0 |
1 |
3 |
0.3 |
A5 |
1 |
1 |
0 |
0 |
0 |
2 |
0.2 |
Fuente: Elaboración propia.
Nota: A1 (Consumo Energético) A2 (Protocolo de comunicación), A3 (Peso), A4 (Velocidad de procesamiento), A5 (Almacenamiento).
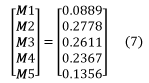
Considerando las ponderaciones de la Tabla 9, se crea (6) que permite elegir como resultado la placa de control asignando variables a cada tipo de la siguiente manera: M1 – Arduino Uno, M2 – Raspberry pi, M3 – ESP32, M4 – PIC, M5 – TM4C1294.

La aplicación del método de decisión binaria da como resultado (7) seleccionando la placa de desarrollo Raspberry Pi con una ponderación de 0.2778.
La Figura 15 presenta el diseño de la PCB tipo Shield para el sistema de mediciones, donde se observan las conexiones de cada uno de los modulos a utilizar, además de especificar las dimensiones en milimetros de la placa.
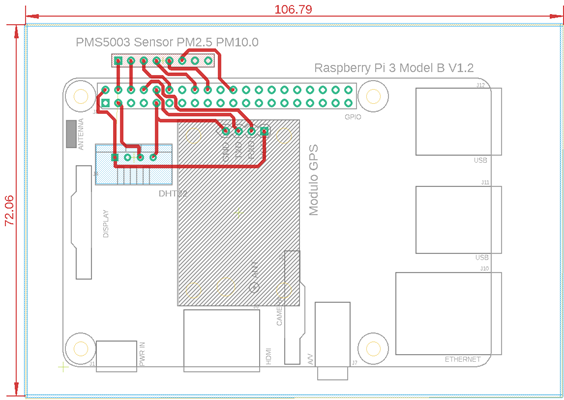
Figura 15: PCB tipo Shield del sistema de mediciones.
Fuente: Elaboración propia.
Es importante mencionar que la posicion del sensor de PM en la PCB se encuentra en la parte superior y a un costado, este debe estar al descubierto para poder realizar de manera eficiente su proceso de medicion de las variables de PM2.5 y PM10.0.
La Figura 16 describe la lógica de funcionamiento del sensor de material particulado PMS5003 el cual fue seleccionado por medio de la matriz binaria.

Figura 16: UAV ala Zagi con el circuito electrónico.
Fuente: Elaboración propia.
La Figura 17 describe la lógica de funcionamiento de tres dispositivos electronicos clasificandolos de la siguiente forma: A – GPS GY-NEO-6M, B – MicroSD y C – sensor de humedad y temperatura DHT22.
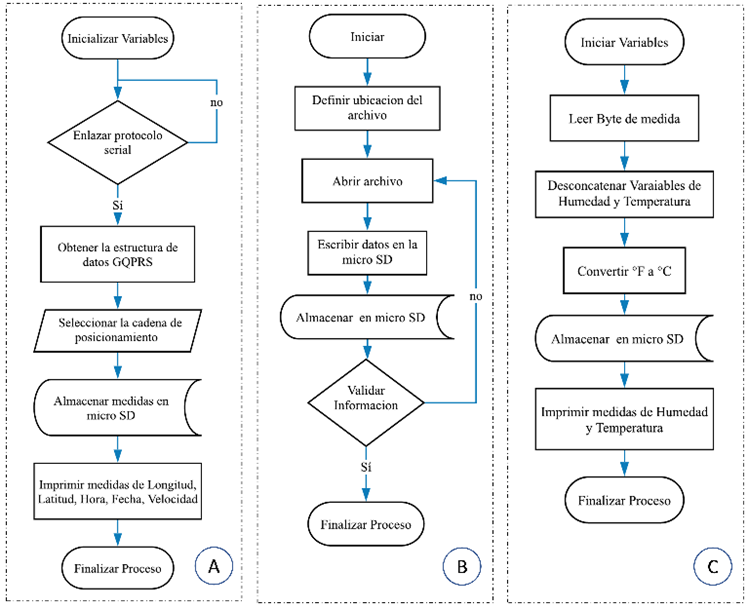
Figura 17: UAV ala Zagi con el circuito electrónico.
Fuente: Elaboración propia.
Todos los procesos representados en el diagrama de flujo se realizan de manera repetitiva en cada medicion.
V. CONCLUSIONES
Se construyó un prototipo de UAV que permite realizar la toma de mediciones de material particulado mediante un circuito de instrumentación, cumpliendo con características que minimizan la invasibilidad en las mediciones.
El diseño del prototipo de UAV modelo de ala Zagi representa alternativas y ventajas a nivel tecnológico y social, siendo este un desarrollo que muestra alternativas a las aplicaciones actuales enfocadas a la recolección de variables de interés como la contaminación asi como también de la implementación en diferentes áreas de la ingeniería.
Se tuvo en consideración implementar y adaptar winglets Bunny ears asimétricos, los cuales permiten desarrollar vuelos con mayor precisión, generar seguridad a la estructura durante el vuelo y proporcionar una restauración parcial de la energía de vórtice en los costados de las alas tipo Zagi.
Se diseña la PCB para el sistema de medición con dimensiones de 0.072 m de ancho y 0.106 m presentando características acordes al vehículo aéreo construido. Además, cuenta con dispositivos electrónicos como Raspberry pi, Sensor de humedad y temperatura, GPS y sensor de material partículado, siendo este último instalado en un costado debido a que es un dispositivo de medición y recolección de informacion de las variables de PM y debe estar de forma libre para obtener datos acertados sin perturbaciones de los demás dispositivos.
Se valida la siguiente metodología para el proceso de construccion de un UAV: se corto el poliestireno de 5mm de espesor con la forma, medidas del ala y los perfiles alares mediante la tension de ferroniquel termico el cual atravezaba la estructura dando la forma deseada, una vez realizado este proceso se le aplica una capa de cinta pasta para dar soporte a cada una de las alas; se procede a unir ambos extremos dando forma al UAV, seguidamente se perforar para realizar el encostillado de un centimetro de espesor dando mayor resistencia a la estructura; una vez formado se aplica una capa de vinilo con el fin de poder resistir humedad y fisuras; luego se realiza el corte y modelado de wingles y alerones para posteriormente adaptarlos al UAV. Para el control de los alerones se añadieron dos servomotores anclados a estos con la finalidad de dar direccion y movimiento en el aire, una vez realizada toda la estructura se añaden los demás dispositvos electronicos como el receptor de radio frecuencia, las dos baterias para suplir la autonomia y los motores con sus respectivas helices y speed controller.
Para el proceso de construccion del UAV fue necesario realizar el encostillado para la estructura y ubicarlo en la parte de mayor espesor para evitar daños y no atravesar las alas de poliestireno, debido a que éste es el soporte y va inmerso en estas piezas. Fue necesario realizar una forma curva a los bordes de los alerones construidos en madera balso, para que al momento de realizar su movimiento de alabeo, a casua de la fuerza ejercida por los servo motores, no presente un rozamiento con las alas y así facilitar su correcto funcionamiento.
Es necesario que los servomotores cuenten con un espacio adecuado dentro de las alas del UAV para que este pueda ejercer su movimiento sin tener fricción con el espacio donde se encuentra ubicado, además de ser incrustado en el espesor de las alas de poliestireno y sujetados con papel vinilo cubriendo solo la caja donde se encuentra los engranajes, el control y el motor. Esto se tiene en cuenta por cuestiones de seguridad debido a que pueden desprenderse en cualquier prueba de vuelo y ocasionar un daño electrónico y a su vez perder el control de una de las alas del vehículo.
VI. REFERENCIAS
[1] L. Galmarini, “Presentacion de dos modelos de ley sobre regulación de Drones en nuestro pais,” 2015.
[2] P. Jiménez, J. Hernández, and J. Silva, “Design of an unmanned aerial vehicle (UAV) for measuring greenhouse gases Diseño de un vehículo aéreo no tripulado (UAV) para medición de gases de efecto invernadero,” vol. 3, pp. 123–132, 2017, [Online]. Available: http://fundacioniai.org/actas.
[3] J. D. Anderson, Aircraft performance and design, vol. 358, no. 207. 2012.
[4] C. Cuerno Rejado, L. García Hernández, A. Sánchez Carmona, A. Carrio, J. L. Sanchez Lopez, and P. Campoy, “Evolución histórica de los vehículos aéreos no tripulados hasta la actualidad,” Dyna, vol. 91, no. 3, p. 332, 2016, doi: 10.6036/7781.
[5] J. E. Márquez-Díaz, “Seguridad metropolitana mediante el uso coordinado de Drones,” Ing. USBMed, vol. 9, no. 1, p. 39, 2018, doi: 10.21500/20275846.3299.
[6] N. J. Castro Latorre, W. D. Coronado, and L. E. Pérez, “Diseño Estructural del fuselaje, ala central y unión ala-Fuselaje para la aeronave no tripulada (UAV) Skycruiser X-1,” 1998.
[7] I. Rendon, A. Fernández Manso, C. Quintano, and L. Calvo, “Diseño e implementación de un VANT (Vehículo Aéreo No-Tripulado, Unmanned Aerial Vehicule, UAV) multisensor para estudios post-incendio en entornos forestales,” Congr. For. español, no. 7, p. 12, 2017, [Online]. Available: http://www.ghbook.ir/index.php?name=فرهنگ و رسانه های نوین&option=com_dbook&task=readonline&book_id=13650&page=73&chkhashk=ED9C9491B4&Itemid=218&lang=fa&tmpl=component.
[8] J. A. Giraldo-Benjumea and C. M. Vélez-Sánche, “Estimación de parámetros de un UAV tipo ala volante mediante algoritmos metaheurísticos,” 2014.
[9] C. C. Gonzáles Regueral, F. Herranz, and C. P. Aguilar, “De los UAV a los RPAS,” perfilesIDS, p. 124, 2014.
[10] S. de S. Aérea, “Evaluación del programa de control de peso y balance para operadores de transporte aereo regular y no regular ( aeronaves propulsadas por turbina de 10 sillas o mas ),” 2007.
[11] S. Pinzón-Paz, “El perfil alar y su nomenclatura NACA,” Cienc. y Pod. Aéreo, vol. 8, no. 1, p. 26, 2013, doi: 10.18667/cienciaypoderaereo.4.
[12] W. Gonzáles, “Diseño y construcción de un vehiculo aéreo no tripulado (UAV), del tipo drone cuadricoptero de carreras,” Institucion universitaria politécnico Grancolombiano, 2017.
[13] P. L. Jimenez Soler and D. Agudelo, Metodología de diseño de aeronaves no tripuladas: Teoría y fundamentos. Editorial Académica Española, 2013.
[14] E. Kaygan and A. Gatto, “Investigation of adaptable winglets for improved UAV control and performance,” Int. J. Aerosp. Mech. Eng., vol. 8, no. 7, pp. 1281–1286, 2014, [Online]. Available: https://waset.org/publications/9998884/investigation-of-adaptable-winglets-for-improved-uav-control-and-performance.
[15] P. Jiménez, J. Hernández, and J. Silva, “Design of an unmanned aerial vehicle (UAV) for measuring greenhouse gases,” Actas Ing., vol. 3, pp. 123–132, 2017, [Online]. Available: http://fundacioniai.org/actas.
[16] Asociación de Pilotos U-Control Argentinos Curso, “Curso básico de aeromodelismo.”
[17] Vistronica SAS, “Vstronica SAS - Kits de electrónica y robótica educativa.” https://www.vistronica.com/ (accessed Nov. 15, 2019).
[18] W. Ojeda-Bustamante, J. Flores-Velázquez, and R. E. Ontiveros-Capurata, “Uso y manejo de drones con aplicaciones al sector hídrico,” p. 425, 2016.
[19] A. Barrientos, P. Cerro, R. Gutiérrez, A. San Martín, A. Martínez, and C. Rossi, “Vehículos aéreos no tripulados para uso civil. Tecnología y aplicaciones,” Univ. Politec. madrid, p. 29, 2007.
[20] G. A. Addati and G. P. Lance, “Introducción a los UAVs, Drones o VANTs de uso Civil,” UCEMA, vol. 551, p. 11, 2014, [Online]. Available: http://hdl.handle.net/10419/130802.
[21] I. García García, “Estudio sobre vehículos aéreos no tripulados y sus aplicaciones,” 2017.
[22] O. Cárdenas, Transductores para procesos industriales, 1st ed. Mérida: Universidad de los Andes, 2010.
[23] M. Á. Muñoz, Nociones basicas de vuelo. 2012.
[24] J. Zitnik, Manual Aerodinamica, vol. 3. 2003.
[25] S. M. Berkowitz, “Airplane performance, stability and control,” J. Franklin Inst., vol. 249, no. 6, pp. 503–504, 1950, doi: 10.1016/0016-0032(50)90415-7.
[26] W. Langewiesche and L. H. Collins, Stick and rudder : an explanation of the art of flying, 1st ed. ilustrada, reimpresa, 1972.
[27] Aircraft Operations, “The benefits of winglets and performance enhancing kits,” Airl. Cost Conf., vol. 48, no. 109, p. 5, 2017.
[28] “NASA - NASA Dryden Technology Facts - Winglets.”
[29] D. Scholz, “Definition and discussion of the intrinsic efficiency of winglets,” INCAS Bull., vol. 10, no. 1, pp. 117–134, 2018, doi: 10.13111/2066-8201.2018.10.1.12.
[30] T. Uzay, “Winglet design and analysis for low-altitude Ali Ihsan Gölcük * Dilek Funda Kurtulus,” vol. 3, no. 1, pp. 64–86, 2017.
[31] J. Hidalgo, “Episodios De Contaminación Por Material Particulado En Curicó Y Su Relación Con Variables Meteorológicas,” 2016.
[32] D. Villalba, E. Johanna, F. Ortiz, and H. Romero, “Relación entre el material particulado PM10 y variables meteorológicas en la ciudad de Bucaramanga - Colombia: Una aplicación del análisis de datos longitudinal,” XXVIII Simp. Int. Estadística, no. July, p. 6, 2018, [Online]. Available: https://www.researchgate.net/publication/329155299.
[33] Mouser Electronics, “DHT11 - Humidity and Temperature Sensor,” 2011. [Online]. Available: https://www.mouser.com/ds/2/758/DHT11-Technical-Data-Sheet-Translated-Version-1143054.pdf%0Ahttp://www.micropik.com/PDF/dht11.pdf%0Ahttp://robocraft.ru/files/datasheet/DHT11.pdf.
[34] Sensirion, “Datasheet SHT21,” 2011. Accessed: 15-Nov-2019. [Online]. Available: www.sensirion.com.
[35] Sensirion, “Datasheet SHT1X,” 2008. Accessed: 15-Nov-2019. [Online]. Available: www.sensirion.com.
[36] T. Liu, “Digital-output relative humidity & temperature sensor/module DHT22 (DHT22 also named as AM2302) Capacitive-type humidity and temperature module/sensor.”
[37] Beijing Hike IoT Technology Co, “HK-A5 Laser PM2.5/10 Sensor.”
[38] Shenzhen, “HM-3300 / 3600 Dust Sensor,” 2018. [Online]. Available: http://wiki.seeedstudio.com/Grove-Laser_PM2.5_Sensor-HM3301/.
[39] Adafruit learning system, “PM2.5 Air Quality Sensor,” 2019. Accessed: 15-Nov-2019. [Online]. Available: https://adafru.it/CiF.
[40] Seed Grow the Difference, “Grove-Dust Sensor User Manual,” 2015.
[41] publiclab, “DSM501A Dust sensor module,” 2004.
